Шаговый двигатель — электрическая машина, у которой вал поворачивается не непрерывно, а отдельными фиксированными углами. Каждый управляющий импульс сдвигает ротор на один шаг. За счет такой схемы привод удобно использовать там, где нужна точная подача, остановка в заданной позиции и повторяемое перемещение без сложной обратной связи.
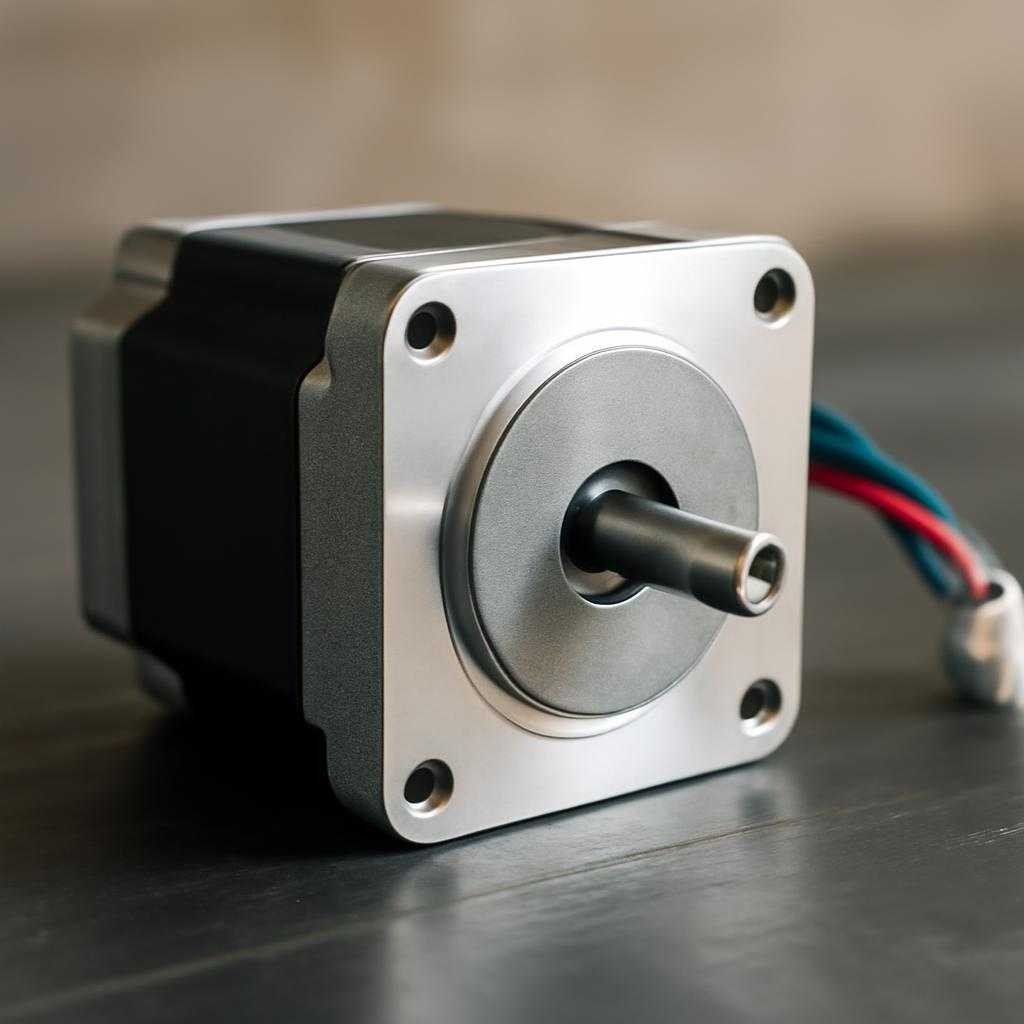
Конструкция включает статор с обмотками и ротор. Статор создает магнитное поле по заданной последовательности включения фаз. Ротор занимает положение, соответствующее текущему состоянию поля, а при следующем импульсе переходит в новое устойчивое положение. Если импульсы идут подряд, вал вращается с угловой скоростью, связанной с их частотой. Направление задает порядок коммутации фаз.
Устройство и работа
По устройству шаговые двигатели делят на двигатели с переменным магнитным сопротивлением, с постоянными магнитами и гибридные. В первом случае ротор выполняют из мягкого магнитного материала с зубцами. Во втором ротор несет постоянный магнит. Гибридная схема объединяет зубчатую структуру и магнитный ротор, поэтому дает высокий момент удержания и малый шаг.
Ключевые параметры привода: угол шага, число фаз, номинальный ток обмотки, сопротивление и индуктивность обмоток, момент удержания, рабочий момент, предельная частота шагов. Угол шага определяет дискретность перемещения. Меньший угол дает более точное позиционирование, но повышает требования к драйверу и механике. Момент удержания показывает, с какой силой двигатель сопротивляется смещению в неподвижном состоянии под током.
Для управления применяют драйвер, который переключает ток в обмоткетюках по заданному алгоритму. Есть полношаговый, полушаговый и микрошаговый режим. Микрошаг делит базовый шаг на несколько частей за счет плавного изменения токов фаз. Ход в таком режиме становится ровнее, снижается вибрация, улучшается плавность на малых скоростях. При этом абсолютная точность каждого микрошагового положения зависит от нагрузки, магнитной системы и настройки тока.
Преимущества и ограничения
Главное достоинство шагового двигателя — предсказуемая связь между числом импульсов и углом поворота. По этой причине его ставят в станки малой и средней мощности, принтеры, дозаторы, координатные столы, клапаны, измерительные узлы, механизмы подачи. При остановке под током вал удерживает позицию без тормоза. Система управления получается понятной: контроллер формирует импульсы, драйвер коммутирует фазы, механика получает дискретное перемещение.
Есть и ограничения. На высоких скоростях крутящий момент падает из-за индуктивности обмоток и ограничений по нарастанию тока. При перегрузке вал пропускает шаги, после чего позиция уже не соответствует числу команд. У некоторых режимов заметны резонанс и шум. Резонанс особенно проявляется в определенных диапазонах скоростей, когда механическая система начинает колебаться. Для борьбы с ним подбирают профиль разгона, меняют режим шага, вводят демпфирование, корректируют ток и напряжение питания.
Эффективность привода сильно зависит от согласования двигателя, драйвера и нагрузки. Если момент инерции механизма слишком велик, резкий старт приводит к срыву синхронизации. По этой причине движение строят через разгон и торможение. Чем выше напряжение питания драйвера при корректном ограничении тока, тем быстрее ток достигает нужного уровня в обмотке и тем лучше поведение на высоких частотах шагов.
Практика выбора
При выборе смотрят на требуемый момент на валу, скорость, точность позиционирования, характер нагрузки и режим работы. Для винтовой подачи оценивают шаг винта и требуемое линейное перемещение за один оборот. Для ременной передачи учитывают диаметр шкива и инерцию подвижной части. После этого определяют запас по моменту, чтобы привод не работал у предельной границы.
Нельзя оценивать двигатель только по моменту удержания. В движении доступный момент ниже, а с ростом скорости он уменьшается. Поэтому важна кривая момент-скорость, которую дают для конкретной пары двигатель-драйвер и заданного напряжения питания. Если система работает с резкими изменениями режима, смотрят на тепловой режим обмоток и корпуса. Длительная работа с высоким током приводит к сильному нагреву.
Для точного хода имеет значение люфт механической передачи. Даже хороший двигатель не компенсирует зазор в гайке, ремне или редукторе. Если узел должен возвращаться в одну и ту же точку, конструкцию проверяют на упругие деформации, трение и перекосы. При необходимости ставят датчик нулевой позиции или полноценную обратную связь. Такой вариант называют замкнутым контуром.
Шаговый двигатель удобен там, где нужна понятная логика работы, точная подача и удержание без сложной силовой части. Его сильные стороны раскрываются при правильном подборе режима, драйвера и механики. Тогда дискретное движение остается точным, устойчивым и предсказуемымсказуемым во всем рабочем диапазоне.